Vektörler
Ele aldığımız uzay zamanı daha detaylı incelemek için vektör kavramını tanımlayacağız. Uzay zaman üzerinde çalışıyor olduğumuz için vektörlerimiz 4 boyutludur ve bu özelliklerinden dolayı genellikle dört-vektör olarak da isimlendirilirler. 3 boyutta alışık olduğumuz vektör kavramından daha farklı özelliklere sahiptirler. Alışık olduğumuz vektör tanımında vektör, 2 nokta arasındaki uzaklığı temsil eder ve bu iki nokta boyunca uzanmaktadır. Ayrıca bu vektörler uç uca eklenerek yeni bir vektör elde edilebilinir. Fakat eğri uzay zaman üzerinde tanımladığımız dört-vektörler bu özellikleri sağlamazlar. Ayrıca uzay zamanda tanımladığımız vektörler tüm değişimler altında invaryanttırlar.
Dört-vektörler, uzay zamanda bulunan bütün noktaları üzerinde tanımlanan tanjant uzayı () üzerinde yaşarlar. Uzay zaman üzerindeki bir noktasından geçebilecek eğrileri düşünelim. Bu eğriler pürüzsüz eğrilerdir yani 1 boyutlu uzaydan 4 boyutlu uzaya sürekli ve sonsuz türevlenebilirdirler. Bu eğrileri gibi bir parametre ile parametrize edebiliriz. Bu parametrize işlemi sayesinde noktasında bu parametreye göre türev işlemi tanımlarız. Bu eğrinin noktasındaki parametresine göre türevi bize o eğri üzerindeki vektörümüzü vermektedir. Bu işlemi bütün eğriler için noktası üzerinde tanımlarsak noktası üzerindeki tanjant uzayımızı ve bu tanjant uzayında bulunan bütün 4-vektörlerimizi tanımlamış oluruz.
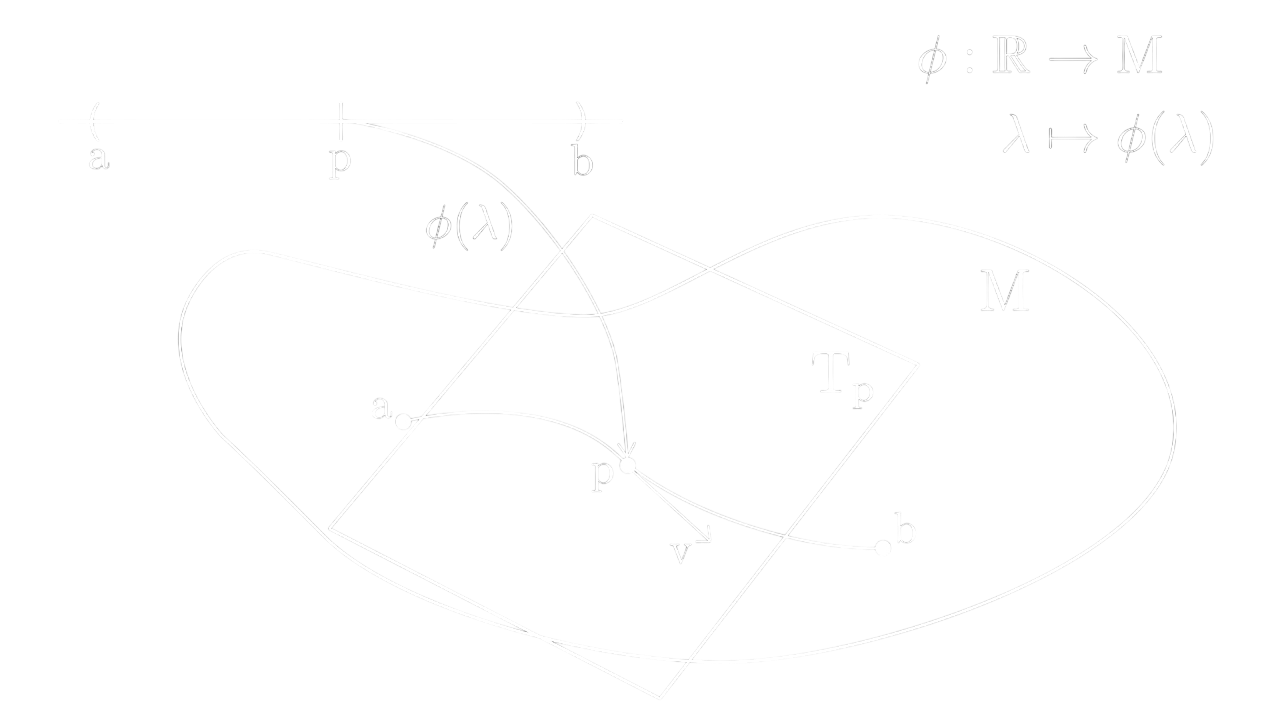
Şekilde gösterilen manifold bizim 4 boyutlu uzay zamanımızı temsil etmektedir. Manifoldlar her bir noktasında lokal olarak öklidyen bir uzaya sahip olan ve bu bölgeleri pürüzsüz bir şekilde birleştirilerek elde edilen topolojik uzaylardır. Örneğin dünya üzerinde yürüyen bir insan lokal olarak bulunduğu bölgenin düz olduğunu söyler fakat dünyayı bir bütün olarak incelediğimizde bu düz parçaların pürüzsüz bir şekilde birleşerek öklidyen olmayan bir uzay oluşturduğunu görürüz. Manifoldların matematiksel özellikleri ve daha fazla ayrıntısı şu an için işimize yaramayacağından bunları sadece bizim uzay zamanımızı ifade etmek için kullandığımız matematiksel bir araç olarak görebiliriz.
Şimdi ise sürekli olarak kullanacağımız vektörleri, bileşenleri ve bazları cinsinden tanımlayalım.
Burada katsayısı vektörünün bileşenlerini ifade etmektedir. Bu yüzden baz vektörlerin bir katsayı olduğu düşünülmemesi açısından alt indiste parantezler kullanılmıştır. Çoğu zaman baz vektörlerini hiç yazmadan vektörü" ifadesini kullanabiliriz, unutmayalım ki bu sadece bir kısaltmadır. Vektörlere verilebilecek en basit örnek, uzay zamandaki bir eğride bulunan tanjant vektörüdür. ile parametrize edilen bir eğrinin koordinatları ile ifade edilir. Tanjant vektörü 'nın bileşenleri ise şu şekilde yazılır:
vektörünün açık hali ise olarak yazılır.
Lorentz dönüşümlerinde iki koordinat sistemi arasında geçiş yapmamızı sağlayan bir Lorentz dönüşüm matrisi elde etmiştik. Bu matrix 4x4 bir matristi. Bu dönüşüm matrislerini bu kısımdan itibaren daha genel bir ifade olan ile göstereceğiz ve matrisi aşağıdaki şekilde dönüşüm sağlamaktadır.
Bunu indeks notasyonu ile ifade edersek
şeklinde yazarız. Bu notasyonu ilk defa görenler için kafa karıştırıcı gözükebilir fakat tek yaptığımız koordinat sistemine geçmek için Lorentz dönüşüm matrisiyle çarpmak ve bunu yaparken doğru indisleri yazabilmek için üst ve alt indislerin (burada 'lerin) birbirini götürdüğünü ve sağ tarafta kaldığını düşünebilirsiniz. Lorentz dönüşümleri altında koordinatlarını değişmektedir. Bu dönüşümler altında invaryant kalacak bir nicelik olan 'yi inceleyelim.
Buradan görüleceği üzere
veya
eşitliğini elde ederiz. Matris notasyonuyla yazdığımızda işlem sırası önemli olsa da indeks notasyonunda işlem sırasının bir önemi yoktur. Lorentz dönüşümleri altında vektörlerin bileşenleri ve baz vektörleri de koordinat dönüşümlerinde olduğu gibi değişmektedir. Tanjant vektörünün bileşenlerinin değişimini şu şekilde yazabiliriz.
Vektörün kendisi invaryant olduğundan bu özelliğinden yararlanarak baz vektörlerinin nasıl dönüşmesi gerektiğini bulabiliriz.
Buradan görüleceği üzere
buluruz. çerçevesinden çerçevesine geçerken nasıl bir dönüşüm olduğunu bulmak için her iki tarafı Lorentz dönüşüm matrisinin tersiyle çarpmalıyız. Eğer tersiyle çarparsak yine bir Lorentz dönüşümü yapmış olacağız. Bu yüzden Lorentz dönüşüm matrisinin tersini de aynı sembolle göstereceğiz fakat bu sefer üslü ifadelerin yeri değişmiş olacak. Yani ile gösterilen Lorentz dönüşüm matrisinin tersi olarak yazılır.
Buradan şu 2 önemli eşitlik elde edilir.
Burada Kronecker deltadır. değerleri için 1, değerleri için de 0 sonucunu vermektedir. Bu kural sayesinde çerçevesinden çerçevesine baz vektörlerin nasıl dönüştüğünü buluruz.
Böylece baz vektörlerin, vektörün bileşenlerinin dönüştüğü Lorentz dönüşüm matrisinin tersi ile dönüşüm gerçekleştirdiğini gösterdik. Yani aslında bu sayede vektörlerin invaryant kaldığını doğrulamış olduk.
Dual Vektörler
Dual vektörler de vektörler gibi manifold üzerindeki noktalarda tanımlanır ve bulunduğu noktadaki vektörleri Reel sayılara dönüştürürler. Dual vektörlerin bulundukları uzaya dual vektör uzayı (kotanjant uzayı) denmektedir ve ile gösterilir. , olsun ve eğer bir dual vektör ise aşağıdaki kuralı sağlamalıdır.
dual vektörünü de baz dual vektörü cinsinden ifade edelim.
Vektörlerde de olduğu gibi burada da dual vektörlerden bahsederken kısaltma olarak bazlarını da yazmak yerine sadece yazacağız. Ayrıca bir dual vektörün bazlarının aşağıdaki eşitliği sağladığını söyleyebiliriz.
Vektörler için yaptığımız dönüşüm tanımlamalarını burada dual vektörler için de yapabiliriz.
Baz dual vektörleri için de
yazılır.
Bir dual vektörün vektör üzerindeki etkisini daha detaylı inceleyelim.
Bu bulduklarımızı kullanarak uzay zaman üzerinde bir skaler fonksiyonun () gradyentinin dual vektör olduğunu gösterelim. Bu skaler fonksiyonun uzay zaman üzerinde tüm noktalarda tanımlandığını ve bir gözlemcinin bulunduğu uzay zaman konumuna göre farklı değerler aldığını söyleyelim. Bu durumda uzay zamandaki her nokta gözlemcinin ölçtüğü uygun zamana () bağlı olarak ifade edilebilecektir. Böylece gözlemcinin aldığı yol boyunca bu fonksiyonda gözlemleyeceği değişim olarak ifade edilir.
'dir. Gradyentin skaler fonksiyon üzerindeki etkisini ise şu şekilde tanımlıyoruz.
Şimdi ise bunun bir dual vektör olduğunu göstereceğiz fakat bunu göstermek için de bir vektöre ihtiyacımız var. Bu vektörü de
olarak tanımlayalım. Bu vektörün bir sütun matris olduğuna dikkat edelim. Şimdi tanımladığımız bu dual vektörün vektöre olan etkisini inceleyelim.
Böylece en basit dual vektör örneklerinden olan skaler bir alanın gradyentini göstermiş olduk. Bu dual vektörü bileşenleri ve baz vektörü cinsinden ifade edersek
yazarız. Ayrıca kısmi türevlerden bildiğimiz zincir kuralı bize dual vektörün bileşenlerinin nasıl dönüştüğünü de söyleyecektir.
Buradan sonra kısmi türevler için aşağıdaki notasyon değişikliğini uygulayacağız.
Tensörler
Tensörler adet dual vektör ve adet vektörden 'a multilineer bir haritalandırmadır. Tensörleri vektör ve dual vektörlerin genelleştirilmiş hali olarak düşünebiliriz. Bir (,) ranklı tensörü, adet dual vektör ve adet vektörü alıp sonucunda bize bir Reel sayı vermektedir.
Bu tanımdan yola çıkarak skalerlerin (0,0), vektörlerin (1,0) ve dual vektörlerin de (0,1) tip tensörler olduğunu söyleriz. Tensörler matematiksel olarak daha detaylı incelenebilir fakat hem o kadar detaya gerek olmadığı hem de fazla kullanışlı olmadığı için bu detayları atlıyoruz. Bizim için önemli olan birkaç tensör tipinden bahsedelim. (1,1) tensörler:
Bu tensörler vektörlerden vektörlere lineer bir haritalandırma yapmaktadır (veya dual vektörlerden dual vektörlere). Ayrıca iki tensörü birbiri ile çarparak başka bir tensör de elde edebiliriz.
Bu işlemleri yaparken üst ve alt indisleri sadeleştirdikten sonra eşitliğin sol ve sağ tarafta aynı indislerin kaldığına dikkat etmeliyiz. Uzay zaman hakkında konuşurken Minkowski metriğini tanımlamıştık. Minkowski metriği (0,2) tip bir tensördür. 2 vektörü girdi olarak alır ve sonucunda bir Reel sayı üretir. Metriğin iki vektör üzerinde yaptığı bu işlem bizim için oldukça önemlidir ve bu işlemi iç çarpım olarak adlandırırız.
Kronecker delta da (1,1) tensörlere bir başka örnektir. Kronecker delta birebir bir haritalandırma yapmaktadır. Ayrıca Kronecker delta ve metrik ile bağlantılı olacak şekilde bir ters metrik () tanımlaması yaparız. Bu ters metriğimiz (2,0) tip bir tensördür ve şöyle tanımlanır.
Tensörlerde sık sık kullanacağımız bir işlem olan büzüştürme (contraction) işleminden bahsedelim. Bu işlem sayesinde (,) tip bir tensör (,) tensöre dönüştürülür. Bu işlem üst ve alt indislerden aynı olanların sadeleştirmesi sonucunda gerçekleşir.
Burada ayrıca dikkat edilmesi gereken olay sadeleştirdiğimiz indislerin sırasının bizim için önemli olduğudur.
Ayrıca metrik ve ters metrik sayesinde tensörlerin indislerini indirebilir veya yükseltebiliriz.
Metriğin bu özelliğini sıklıkla vektörler ve dual vektörleri birbirine dönüştürürken kullanacağız.
Bir tensörün indisleri arasındaki sıra değişmesine rağmen tensörün kendisi değişmiyorsa böyle tensörlere simetrik tensör deriz. Mesela tensörü ilk iki indisi için simeterik olduğu söyleniyorsa
eşitliği sağlanır. Eğer tensörü üç indisi için de simetrikse
yazılır. Ayrıca eğer indislerinin sırası değiştiğinde tensörün işareti değişiyorsa, bu tip tensörlere antisimetrik tensör denir. Birinci ve üçüncü indisleri için antisimetrik olan bir tensör örneği şu şekilde verilir:
Bu bölümde vektörler, dual vektörler ve tensörlerden bahsettik sonraki bölümde göreli dinamiğinden bahsedeceğiz.