Einstein'ın muhteşem teorisi: Görelilik.
Newton’un ünlü denklemi kadar bilinen bir denklem varsa, o da şüphesiz olmalı. Bu formül, Einstein’ın “muhteşem yılı” (annus mirabilis) olarak adlandırılan 1905 yılında yayınladığı "Zur Elektrodynamik bewegter Körper" (Hareketli Cisimlerin Elektrodinamiği Üzerine) adlı makalede ilk kez yer aldı. 1905 yılına “muhteşem” denmesinin bir diğer nedeni ise Einstein’ın aynı yıl fotoelektrik etkiyi açıkladığı çalışmasıyla 1921 Nobel fizik ödülünü kazanmasıdır.
Bu yazının yazılmasındaki temel amaç, görelilik teorisi hakkında oldukça kısıtlı olan Türkçe kaynaklara bir katkıda bulunmaktır.
Dersimize başlamadan önce Einstein’ın özel görelilik teorisini dayandırdığı iki temel postulatı belirtelim:
- Fizik yasaları tüm eylemsiz referans çerçevelerinde aynıdır.
- Işık kaynağının veya gözlemcinin hareketinden bağımsız olarak vakumdaki ışığın hızı, tüm gözlemciler için aynıdır.
Yazımız boyunca kullanacağımız “referans çerçevesi” ve “koordinat sistemi” ifadeleri eş anlamlıdır. Koordinat sistemi ve gözlemcinin ne olduğu hakkında herkesin bir fikri vardır; fakat eylemsiz koordinat sistemi üzerinde biraz daha dikkat edilmesi gereken bir konudur. Newton’un 1. yasasının geçerli olduğu referans sistemlerini eylemsiz referans sistemi olarak tanımlıyoruz.
Lorentz Dönüşümleri
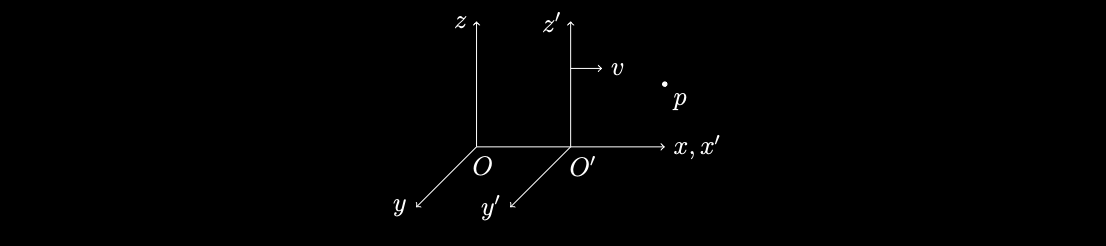
ve olarak iki referans sistemi ele alalım. sistemi, ’e göre hızıyla yönünde hareket ediyor olsun. anında iki sistemin ve noktaları çakışmaktadır.
çerçevesinde gerçekleşen herhangi bir olay, çerçevesinde de tarif edilebilmelidir. Yani noktasındaki bir olayın koordinatları sisteminde ve sisteminde olarak ölçülür. Lorentz dönüşümlerinin temel amacı bu iki koordinat sistemi arasında nasıl bir bağlantı olduğunu ortaya çıkarmaktır.
Aradaki dönüşümü bulmak için, en genel haliyle dönüşümün lineer olduğunu kabul edebiliriz. Uzay ve zamanın homojen olması da bu lineerliği destekler. Eksenler arasındaki göreli hareket sadece ekseni doğrultusunda olacağından:
olmalıdır.
Genel olarak ve yazabiliriz. Ancak göreli hareket doğrultusunda olduğundan ve ifadeleri ve ’ye bağlı olmamalıdır. Dolayısıyla:
İki sistem birbirine dik eksenlere sahip olup doğrusal hareket ettiğinden aralarında bir lineer dönüşüm olduğunu kabul edebiliriz. Bu dönüşüm en genel haliyle:
şeklindedir.
anında ve olduğundan sabit terimler yoktur (yani ).
Ayrıca noktasının hareketi her iki gözlemciye göre:
olmalıdır. Bunu (1)’de kullanırsak:
Şimdi (1) ve (2) denklemlerini matris formunda yazıp ve ’yi çözelim:
Kısaca dersek:
Ters matris:
Dolayısıyla:
Buradan:
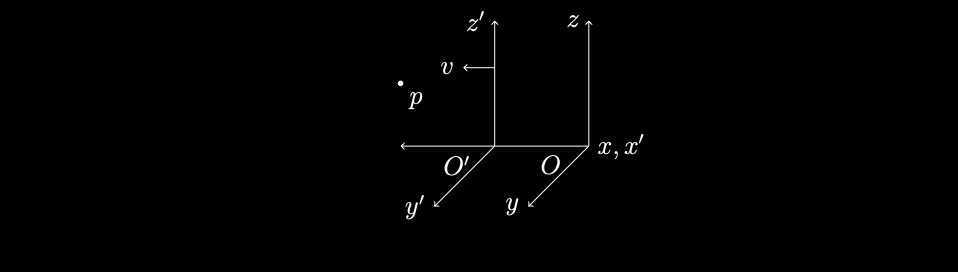
Şimdi sistemin düzlemine göre simetrik halini düşünelim. Bu durumda noktasının koordinatları için ve için olur. Simetriden dolayı ölçeceğimiz uzaklık ve zaman büyüklükleri aynı kalmalıdır.
(3) denklemini tekrar ele alalım. dönüşümü yapılırsa, (3)’ün doğru kalması için (eşdeğer olarak de işaret değiştirecektir) dönüşümü gerekir.
(4) denkleminde yerine eksi işaretlilerini yerleştirelim (zaman için eksi gelmez):
Buradan şu sonucu çıkarırız:
- ’nin işaret değiştirmesi, ve ’nin de işaret değiştirmesine yol açar.
Buradan sonra şu kabulü yapacağız: ’den ’ye geçiş, iki sisteme göre simetrik olmalıdır (Galileo dönüşümlerinde olduğu gibi). Yani bir dönüşümden diğerini yaparak elde edebilmeliyiz.
Bu durumda ve dönüşümleri altında:
Bunu matris formunda da yazalım:
Buradan tekrar düzenleyerek:
elde edilir; yani:
(4) ve (6) denklemlerini eşitleyelim:
Buradan:
ve
sonucuna ulaşılır.
Einstein’ın ikinci postulatına göre ışığın boşluktaki hızı tüm gözlemciler için aynıdır. Bu değişmezliği kullanarak ilerleyelim. noktasından bir ışık ışını saçıldığını düşünelim. Her iki gözlemci için de ışık hızı aynı ölçüleceğinden:
(1)–(2) ve (9) ile:
Buradan:
(3) ile birlikte:
(10)’u (8)’de yerine yazalım:
Son haliyle Lorentz dönüşümleri:
ve ters Lorentz dönüşümleri:
Serimizin bir sonraki yazısında Lorentz kısalması, zaman genişlemesi ve hız/ivme dönüşümlerinden bahsedeceğiz — bakalım bu teori bizi nereye götürecek.