Frenet Çatısı
Herkese merhaba ! Umarım her şey yolundadır.Çıktığımız diferansiyel geometri yolculuğunun beşinci bölümünde geçen bölümlerde tanımladığımız eğri kavramının üzerine ekleyeceğim bir çok şey var. Keyifli okumalar.
3-Boyutlu Öklid Uzayında Bir Eğrinin Frenet Çatısı
Bu başlıkta geçen bölümde tanımladığımız teğet kavramının üzerine yeni kavramlar tanımlayacağız.
Teorem
eğrisinin birim teğet eğrisi olsun. O halde olur.
kanıt.
Aslında bu fazla kolay, olmasından dolayı her tarafın 'ye göre türevini alırsak sonucuna varılır buradan da diklik yorumu yapılır. □
Bu teorem basit, ancak etkili bir teoremdir çünkü bize bir eğrinin teğetine dik başka bir vektör alanının varlığına işaret eder. Bu vektör alanı teğetin türevine paraleldir ve buna eğrinin birim normali denir.
Tanım
eğrisinin birim teğet eğrisi olsun.
olarak tanımlanan eğriye eğrisinin birim normali denir.
Yukarıdaki tanımdan zaten birim normalin teğetin türevine paralel olduğu açıkça görülüyor. Fakat buradaki dikkat çekmek istediğim başka bir nokta var. Teğetin türevinin normu bize önemli bir bilgi verir, eğrinin uzunluğu değiştikçe teğet de buna bağlı olarak değişir, işte bu değişimin boyunu verir. Biz buna eğrinin eğriliği ismini veriyoruz.
Tanım
eğrisinin birim teğet eğrisi olsun. Bu eğrinin eğriliği aşağıdaki gibi tanımlanır.
Sonuç
eğrisinin birim teğet eğrisi , eğriliği ve birim normal eğrisi olsun. O halde aşağıdaki eşitlikler geçerlidir.
Fakat üzülerek söylemek istiyorum ki yay uzunluğu parametresi öyle her zaman karşınıza çıkacak bir parametre değil, o yüzden eğrilik hesaplamak için daha başka yöntemlere ihtiyaç duyabilirsiniz. Bu yüzden şimdi tanımlamaya başlayacağımız binormal vektör alanı ile burulma kavramından sonra sizlere bir formül daha verip bunu kanıtlayacağım. Her neyse, biz çıktığımız keşif yolculuğuna devam edelim. Bir eğri bize verildiğinde o eğriye teğet bir vektör alanı ile o eğriye her noktada normal olan bir vektör alanı bulabiliyoruz, üstüne üstlük bu eğrinin eğriliğini de biliyoruz. Şu anda yapmak istediğimiz şey aslında bir eğri için lokal bir baz oluşturmak, yani şunu demek istiyorum üç boyutlu uzayda bir noktası verildiğinde bu ne anlama gelir? -eksenindeki bileşeni , -eksenindeki bileşeni ve -eksenindeki bileşeni olduğu anlamına gelir. Yani aslında eksenlerimiz bir baz oluşturur. Tıpkı bunun gibi bir noktayı bir eğrisinin noktasında hesaplayacağımız özel koordinat sistemine göre de ifade edebilmek istiyoruz ("tabi siz anneleri tarafından size emanet edilen çocuklara her bakımdan yetersiz gördüğünüz bir kadının annelik etmesine şiddetle karşısınız ama" cümlesi gibi oldu.). Peki biz bir noktayı ve kullanarak hesaplayabilir miyiz? Cevabı "her zaman değil" çünkü bizim uzayımız üç boyutlu, üç boyutlu bir uzayı iki vektörle geremeyiz(lineer cebirden span etmek kavramını hatırlayın.). Dolayısıyla bir vektöre daha ihtiyacımız var, böylece lokal bazımız(evet yöresel.) hazır olacak.
İşte Aranan Kan: Binormal Vektör !
Hadi çok farklı bir şey yapalım ve normalin türevini alalım, kalkülüsçüler ağlamasın diye daha formal bir dil kullanayım hatta: " eğrisi yay uzunluğu parametresine sahip olsun, teğeti ve normali olsun." O halde}
nasıl hesaplanır? Bu hesabı yaparken bir fizikçi gibi davranıp hayali vektörler düşüneceğiz, şimdiden haberiniz olsun. Başlayalım. olduğundan,
olacaktır buradan olduğu çıkar. İlk yorum olarak olduğu yanılgısına varılabilir, ancak biz
olduğunu biliyoruz. Buranın türevini alırsak,
sonucuna ulaşırız. Eee peki buradan ne gelecek dediğinizi duyar gibiyim, şu gelecek: biz 'in teğete dik olduğunu biliyoruz. Normalin türevi bu vektörü bileşenlerinde barındırdığından dolayı(yani teğete dik bir bileşeni olduğundan dolayı) normalin türevi teğete paralel olamaz. O halde teğet vektörünün yanında normal ve teğete dik bir bileşen daha içermelidir. Biz bu vektöre binormal vektör adını veriyoruz. Binormal vektörü ile gösteriyoruz. O halde şu ana kadar konuştuklarımızı özetleyecek olursak, normal vektörün teğeti , fonksiyonları için
olarak yazılır. Şimdi gelin , fonksiyonlarını irdeleyelim. Biz binormal vektörün tanımı gereği ve olduğunu biliyoruz. Hatta buradan binormal vektörün birim vektör olması gerektiğini(bunun için çok haklı gerekçelerim var) söyleyerekten olduğunu söyleyebiliriz. Bunu kullanırsak, yukarıdaki denklemde her tarafı ile iç çarpımını alırsak,
sonucuna ulaşırız, aslında eşitliğin sol tarafı bize o kadar da yabancı değil. Çünkü biz eğrilik kavramını tanımlarken olduğunu gözlemlemiştik. Ayrıca olduğundan
olduğunu gözlemleriz, iki denklemi birleştirirsek,
sonucuna ulaşırız. Eğrilik yine karşımıza çıktı yani. Öte taraftan benzer biçimde dikliği kullanırsak,
olacaktır, yani
olduğu sonucuna varılır. Peki bu ifade nedir? Burulmanın ta kendisidir. Bir eğrinin burulması ile gösterilir, yani olur. Şimdilik hesaplarımız bittiğine göre sonuçlara geçelim.
Sonuç
Birinci sonucu bir tık irdelemek istiyorum. Binormal vektörün türevinin normal yönündeki bileşeni , bunda hemfikiriz. Peki başka bileşeni var mı? Binormal vektör de birim vektör olarak tanımlandığı için olduğunu biliyoruz, o halde binormal yönünde bir bileşenimiz yok. Teğet yönünde var mı peki? Bunun için binormal vektörü tanımını kullanalım, türev alırsak,
sonucuna ulaşırız ki bu da binormalin türevinin teğete dik olduğunu söyler, yani sadece normal bileşeni vardır. O halde aşağıdaki sonucu elde ederiz.
Sonuç
O halde elimizde birbirine dik, dolayısıyla lineer bağımsız, üç tane vektör var ve bunlar üç boyutlu Öklid uzayını gererler. Yani herhangi bir vektör bu üç vektörün lineer kombinasyonu ile yazılabilir dolayısıyla her için bu vektörler lokal bir baz oluşturur. İşte biz buna Frenet çatısı ismini veririz.
Bir Eğrinin Frenet Çatısı
Tanım
eğrisi yay uzunluğu parametresine sahip olsun. Bu eğrinin eğriliği , burulması teğeti , normali ve binormali olsun. O halde bu eğrinin Frenet çatısı
ile verilir. Frenet çatısının elemanları aşağıdaki diferansiyel denklemler sisteminin çözülmesiyle bulunur:
Daha öncesinde diferansiyel denklemler dersi almış okuyucu bu tarz sistemlerle uğraşmaya alışkındır, aslında oldukça ilkel bir diferansiyel denklemler sistemi olmasına karşın çözüldüğünde bize bütün eğriyi verir. yani aslında eğrilik ve burulma fonksiyonları verildiğinde biz bu sistemi çözdüğümüzde bir eğriye ulaşırız. Bu da demek oluyor ki bir eğrinin eğrilik ve burulması o eğriye özgüdür, başka bir eğri aynı özelliklere sahip değildir. Bu cümle bize Öklid uzayında eğrilerin temel teoremini verir.
Öklid Uzayında Eğrilerin Temel Teoremi
, türevlenebilir fonksiyonları verilsin. O halde 'nin eğrilik ve 'nin burulma olduğu yay uzunluğu ile parametrelenmiş yalnızca bir düzgün eğrisi vardır. Öteki eğriler bu eğrinin döndürülmüş veyahut ötelenmiş halidir, yani bu eğriye denktir.
Bu teoremin ispatını atlayacağız, çünkü ispatı diferansiyel geometriyi değil diferansiyel denklemleri ilgilendiriyor, aslında bu teorem, varlık ve teklik teoreminin bir uygulamasıdır. Daha önceden de bahsettiğim gibi hayat her zaman güzelliklerle dolu değil, bazen eğrimiz yay uzunluğu parametrizasyonuna sahip olmayabiliyor(bkz aşağıdaki örnek.) böyle durumlarda Frenet çatısını hesaplamak bir tık daha meşakatli olabiliyor, yine de imkansız değil elbette.
Örnek
eğrisi ile tanımlansın. Bu eğrinin yay uzunluğu parametresi
olarak hesaplanır, fakat bu integralin elementer bir hesabı yoktur, ancak sayısal olarak yaklaşılabilir(inanmıyorsanız deneyin.).
Teorem
eğrisi keyfi bir parametresine sahip olsun. Bu eğrinin eğriliği , burulması teğeti , normali ve binormali aşağıdaki diferansiyel denklemler sisteminin çözülmesiyle bulunur.
Burada ve olarak hesaplanır.
kanıt.
Diferansiyel denklem sistemindeki katsayısının zincir kuralından geldiği açıktır, çünkü
olduğunu kalkülüs'ün temel teoreminden biliyoruz(evet saygıdeğer lise hocalarım, türev ve integral birbirinin tersi, hu ayn ayn.). Eğrilik ve burulma için verilen formülleri kanıtlamamız yeterli. Öncelikle bir gözlem yapalım, şayet parametremiz olsaydı yani yay uzunluğu parametresi olsaydı , , olacaktı, yerine koyduğumuzda zaten yay uzunluğu parametresi için ürettiğimiz formüllerle özdeş bir formüle ulaşıyoruz. Dolayısıyla iddiamız "tutarlı". Şimdi de keyfi bir parametresi için düşünelim. olur. Buradan türev almaya devam edeceğiz, öncesinde kolaylık olsun diye dönüşümü yaparsak ve Frenet çatısının özelliklerini kullanırsak
denklemlerine ulaşırız. Buradan da iç çarpımlar, vektörel çarpımlar havada uçuşsa( ve için yazdığımız denklemlerde bu ifadeleri yerine koyarsak) sonuçlara ulaşırız. Kolay gele! □
Örnek
Bu örnekte eğrisinin Frenet çatısını bulacağız. Bu hesapları yapmak için Python kodu kullanacağız, fakat öncesinde bu eğrinin yay uzunluğuna göre parametrize edildiğini gözlemlemenizi istiyorum. Yani 'dir.
import sympy as smp
from sympy import *
import numpy as np
import matplotlib.pyplot as plt
from sympy.plotting import plot_parametric
#Kütüphaneleri indirdik.
x=smp.symbols("x",real=True,pos=True)#Değişkenimizi(yay uzunluğu parametremiz) tar
r=smp.Matrix([smp.cos(x), smp.sin(x), 0])#Eğimizi tanımlıyoruz.
v=smp.diff(r,x)#Eğrinin teğetini tanımlıyoruz.
T=v/v.norm()#Birim Teğeti tanımlıyoruz.
kappa=smp.diff(T,x).norm()/v.norm()#Eğriliği hesaplatıyoruz.
N=smp.diff(T,x)/smp.diff(T,x).norm()#Normali hesaplatıyoruz.
B=T.cross(N)#Binormali hesaplatıyoruz
tau=smp.diff(B,x).norm()/v.norm()#Burulmayı hesaplatıyoruz.
ax = plt.figure().add_subplot(projection='3d')
xx = np.linspace(0, 2*np.pi, 100)
rr_1 = smp.lambdify([x],r[0])(xx)
rr_2 = smp.lambdify([x],r[1])(xx)
ax.plot(rr_1,rr_2, label='Birim Çember')
ax.legend()
plt.show()
Şimdi daha şekilli bir örnek yapalım.
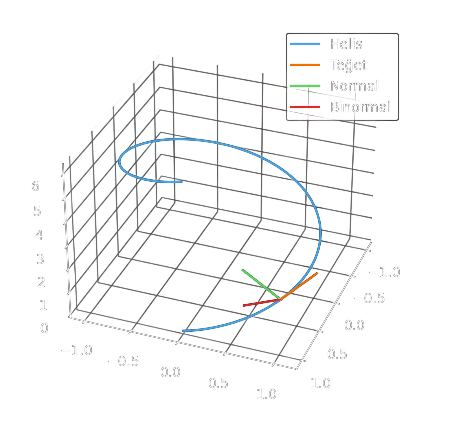
Örnek
Bu örnekte eğrisinin Frenet çatısını bulacağız. Bu eğriye helis denir. Dikkatinizi çekerim, bu örnekte , yay uzunluğu parametremiz değil. Yine de problem değil, çünkü buna göre bir Python kodu yazabiliriz.
import sympy as smp
from sympy import *
import numpy as np
import matplotlib.pyplot as plt
from sympy.plotting import plot_parametric
#Kütüphaneleri indirdik.
x=smp.symbols("x",real=True,pos=True)#Değişkenimizi(yay uzunluğu parametremiz) ta
r=smp.Matrix([smp.cos(x), smp.sin(x), x])#Eğrimizi tanımlıyoruz.
v=smp.diff(r,x)#Eğrinin teğetini tanımlıyoruz.
T=v/v.norm()#Birim Teğeti tanımlıyoruz.
kappa=smp.diff(T,x).norm()/v.norm()#Eğriliği hesaplatıyoruz.
N=smp.diff(T,x)/smp.diff(T,x).norm()#Normali hesaplatıyoruz.
B=T.cross(N)#Binormali hesaplatıyoruz
tau=smp.diff(B,x).norm()/v.norm()#Burulmayı hesaplatıyoruz.
# Binormal
binormal_Line=r+t*B
# Normal
normal_Line=r+t*N
# Teğet
tangent_Line=r+t*T
ax = plt.figure().add_subplot(projection='3d')#Eğriyi çizdiriyoruz.
xx = np.linspace(0, 2*np.pi, 100)
rr_1 = smp.lambdify([x],r[0])(xx)
rr_2 = smp.lambdify([x],r[1])(xx)
rr_3 = smp.lambdify([x],r[2])(xx)
# Binormal Line
bb_1 = smp.lambdify([x, t],binormal_Line[0])(1, xx/10) bb_2 =
smp.lambdify([x, t],binormal_Line[1])(1, xx/10) bb_3 = smp.lambdify([x, t],binormal_Line[2])(1, xx/10)
# Normal Line
nn_1 = smp.lambdify([x, t],normal_Line[0])(1, xx/10) nn_2 =
smp.lambdify([x, t],normal_Line[1])(1, xx/10) nn_3 = smp.lambdify([x, t],normal_Line[2])(1, xx/10)
# Tangent Line
tt_1 = smp.lambdify([x, t],tangent_Line[0])(1, xx/10) tt_2 =
smp.lambdify([x, t],tangent_Line[1])(1, xx/10) tt_3 = smp.lambdify([x, t],tangent_Line[2])(1, xx/10) ax.plot(rr_1,rr_2,rr_3, label='Helis')
ax.plot(tt_1,tt_2,tt_3, label='Teğet')
ax.plot(nn_1,nn_2,nn_3, label='Normal')
ax.plot(bb_1,bb_2,bb_3, label='Binormal')
ax.legend()
plt.show()
Bu kodu çalıştırdığımızda bize helis eğrisini ve için o noktadaki teğet, normal ve binormal vektörleri göreceğiz.
Bir Sonraki Bölümde...
Bu bölümde eğrilerin Frenet çatısını tanımlayıp bazı örnekler yaptık, bir sonraki bölümde ise Frenet çatısı ile eğrinin karakteristik özelliklerini bulabileceğimizi göreceğiz, örneğin bir eğrinin eğriliği pozitifse ne olur, burulması sıfır olursa ne olur gibi özellikler göreceğiz. Burulmaya geometrik açıdan bakacağız, vs vs. Kendinize çok iyi bakın !